

We thank our sponsors that support the research programs of the LINC Lab:
|
|
National Science Foundation (ECCS/CPS and IIS/HCC)
Science and Engineering for Integrating User, Wearable Robotics, and Cyber Systems
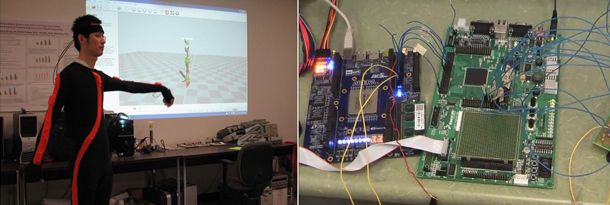
Wearable robotics such as prosthetics and exoskeletons have enabled a upright mobility for those who have lost the ability to walk due to paralysis or limb amputations. However, current control of these devices are based on intrinsic sensors, which limits the function of these assistive devices. Our research group will systematically investigate the interactive effects between the user, robotics, and enviroments, establish novel concepts in the field of cyber-physical system and human-centered computing, develop advanced engineering frameworks to implement intelligent and robust control of wearable robotics, and essentially improve the motor functions of patients with lower limb disabilities.
|
|
National Institutes of Health (NIH/NICHD)
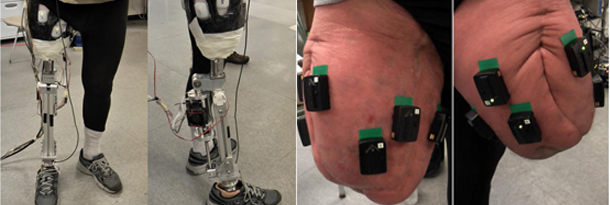
Development of a neurally controlled prosthetic legs
|
|
Rhode Island Science and Technology Advisor Council(STAC)
Design of active stumble recovery control for artificial legs To date, commercially available prostheses have not incorporated stumble detection and prevention strategies within the device. This is due, in part to the lack of appropriate algorithms to rapidly and reliably respond. In this project, we will design an effective stumble detector with high detection accuracy and fast response time.
|
|
 |
 |
 |
 |